Building Information Modeling (BIM) has gained widespread acceptance throughout the building life cycle ( Ilter and Ergen, 2015 , Shahi et al., 2019 , Tayeh and Issa, 2020 ). This includes the planning, construction, operations, administration and demolition phases. Later operations have a significant impact on the overall life cycle costs and are therefore just as important as the construction phase (Mill et al., 2013, Xu et al., 2017). It now supports applications in emergency response, location-based services, immersive environments and metaverse platforms (Hadavi and Alizadehsalehi, 2024, Sun and Turkan, 2020, Ding et al., 2019). The Industry Foundation Classes (IFC) standard has improved interoperability between Architecture Engineering Construction (AEC) software. Researchers have integrated BIM with virtual reality, augmented reality and hologram technologies (Lin and Cheung, 2020). Digital twin applications in BIM environments are also being actively explored (Lu et al., 2020). There are advances in operational data generation, information sharing, and dynamic updates (Tan et al., 2024, Austin et al., 2020). However, BIM models for operational and management phases are still in their early stages (Heaton et al., 2019). As the application of BIM expands into operations and maintenance, there is an increasing need for accurate models to support building renovation and deviation correction. Therefore, reverse modeling based on point cloud data (PCD) has become a key method for generating BIM models.
The common method for converting scanned PCD to BIM relies heavily on manual operations (Jung et al., 2014), but complex geometry and architectural details can result in time-consuming workflows and reduced model accuracy (Volk et al., 2014). To solve the problem in built BIM modeling, PCD-to-BIM process automation has been actively researched (Cheng et al., 2019, Yang et al., 2020). Current approaches to reconstructing as-built BIM models face several interrelated challenges that limit their practical implementation in the industry. There are currently several technical limitations to PCD to BIM conversion methods. Most methods rely heavily on geometric feature analysis and have difficulty effectively distinguishing different instances of the same component type. The traditional automated workflow requires complex steps and a large number of parameter adjustments, which further increases the processing complexity (Hong et al., 2015, Macher et al., 2017). In parallel, some studies have focused on improving the geometric precision of the collected data itself. For example, by combining light detection and ranging (LiDAR) and depth camera detection, submillimeter accuracy can be achieved for structural inspection (Hu et al., 2024). However, greater data accuracy alone cannot address the fundamental challenges of instance differentiation and modeling automation in the PCD-to-BIM pipeline.
To overcome these challenges, researchers have turned to deep learning techniques to develop new methods (Tang et al., 2022, Ochmann et al., 2019). Three-dimensional (3D) semantic segmentation technology can automatically classify building elements into categories such as walls, floors and ceilings, greatly improving the accuracy and efficiency of modeling (Mahmoud et al., 2024). The current semantic segmentation networks are mainly divided into two methods: voxel-based and point-based (Choy et al., 2019, Graham et al., 2018, Chu et al., 2021, Xu et al., 2021). Although semantic segmentation has made progress in overall scene understanding, the lack of effective instance-level detection can result in a large post-processing effort to correct incorrect connections and geometric inconsistencies in the model. These factors significantly impact the level of automation and processing efficiency of the PCD to BIM conversion workflow, especially when it comes to manufactured residential buildings that contain multiple similar structural elements. These limitations have led researchers to turn to the more complex method of instance segmentation (Wang et al., 2025a), which can represent and identify each object in detail, thereby more accurately preserving the spatial details in the scene. However, for the basic architectural elements such as walls, doors and windows, semantic segmentation and traditional machine learning algorithms (Khan et al., 2014, Fischler, 1981) show good performance and strong generalization ability. Recent advances have improved the geometric perception capability of point cloud learning networks and achieved more accurate boundary localization and shape recovery (Wang et al., 2025b). However, such methods still operate primarily at the segmentation level, and the resulting instances often require additional geometric regularization to achieve the dimensional consistency expected in BIM models. This hybrid method effectively identifies components by leveraging semantic features and geometric features. In contrast, the end-to-end 3D instance segmentation network incurs high computational costs and complex parameter adjustments when dealing with such basic components. This is particularly important because in a typical indoor PCD to BIM project, structural elements such as ceilings and floors are usually in the form of a single instance with obvious geometric features and can be efficiently identified using simpler methods.
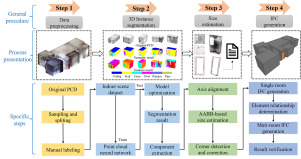
To address the challenges of inefficient geometric feature analysis and instance detection in the automated PCD-to-BIM conversion process, this paper proposes an innovative integrated framework consisting of four purpose-built modules that work together. The preprocessing module uses advanced voxel-based downsampling techniques combined with statistical outlier elimination algorithms, significantly improving data quality while effectively reducing computing resource consumption. The semantic segmentation module integrates advanced deep learning architectures with carefully calibrated unsupervised clustering algorithms to achieve high-precision PCD instance segmentation, particularly excelling in identifying and classifying various indoor architectural elements. The dimensional estimation module introduces an innovative multi-scale axial boundary box analysis technology coupled with adaptive threshold optimization methods, enabling accurate extraction of geometric parameters from irregular building components, overcoming the limitations inherent in traditional geometric shape processing approaches. The IFC generation module implements a comprehensive and systematic layering strategy capable of handling both single-room and multi-room spatial configurations while maintaining critical spatial relationships between building elements, ensuring both integrity and practical utility in the generated models. To thoroughly validate the effectiveness and generalizability of the framework, a comprehensive IFC dataset spanning various building typologies and complexity levels was developed, with rigorous performance evaluations in various real-world scenarios demonstrating significant benefits in terms of geometric accuracy, semantic completeness and computational efficiency.
In summary, this paper presents a PCD-to-BIM transformation approach that seamlessly integrates advanced PCD segmentation neural networks with robust unsupervised clustering algorithms. This comprehensive approach automatically identifies and reconstructs building elements directly from raw PCD, significantly reducing the need for human intervention while improving the geometric accuracy and semantic richness of the resulting BIM model. The approach effectively scales to accommodate large data sets and complex interior structures, providing a versatile solution for automatic BIM generation. This study makes several important contributions.
- (1)
A systematic four-step framework enables automatic PCD-to-BIM conversion with high geometric accuracy and processing efficiency, reducing manual intervention and improving modeling automation.
- (2)
The framework combines semantic segmentation networks with unsupervised computing engines to perform precise 3D instance segmentation, achieving better performance than traditional methods.
- (3)
A complete IFC generation workflow is developed that includes axis alignment, dimensional estimation and geometric correction, effectively managing complex interiors and large point cloud data for accurate parametric modeling.
- (4)
To support a comprehensive assessment of different building types, a dedicated IFC validation data set is provided, ensuring reliable element relationships and compliance with modeling standards.
The rest of the paper is structured as follows. Section 2 reviews the relevant literature on semantic instance segmentation and 3D BIM reconstruction. Section 3 presents the proposed method. Section 4 discusses the dataset, evaluation metrics, and experimental results. Section 5 contains the conclusions.