Osaka, Japan – Scientists from Osaka University, Hiroshima University and Nanyang Technological University, Singapore (NTU Singapore) have developed a swarm navigation system for cyborg insects, paving the way for their use in disaster relief, search and rescue operations, etc. Infrastructure inspection.
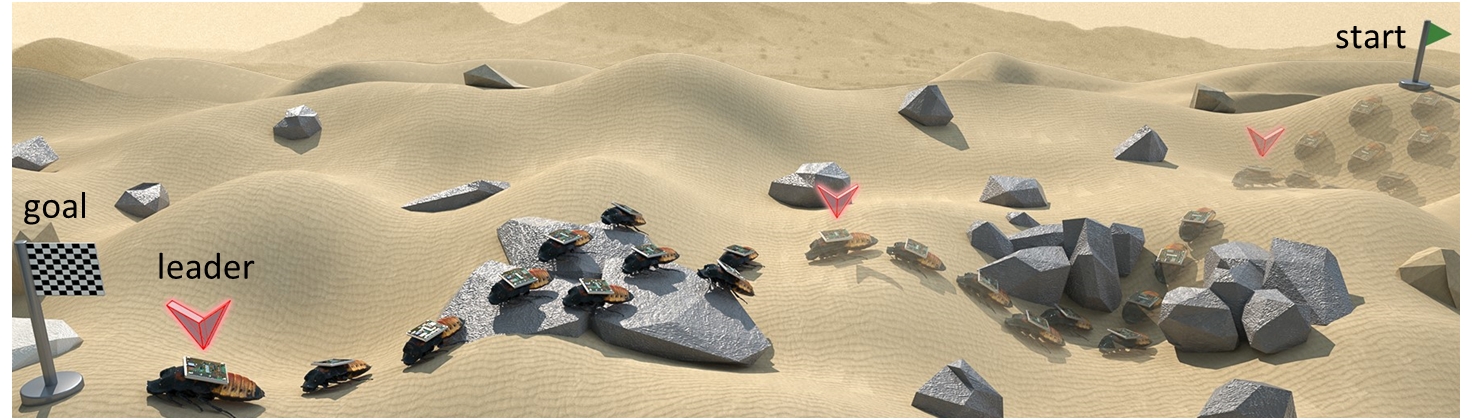
Their innovative system uses a leader-follower dynamic, in which a cyborg insect acts as a group leader and guides others. As swarm technology expands and develops, it can complement disaster relief, search and rescue efforts, and infrastructure inspection by allowing cyborg insects to efficiently navigate dangerous and inaccessible areas to search for survivors after a disaster or detect specific deficiencies in Infrastructures.
Researchers led by Naoki Wakamiya from Osaka University and Masaki Ogura from Hiroshima University developed the swarm control algorithm and computer programs, while scientists led by Professor Hirotaka Sato from the School of Mechanical and Aerospace Engineering at NTU Singapore prepared the cyborg insect swarm and implemented the algorithm the insects' electronic backpacks and carried out the physics experiments at the NTU School of Mechanical and Aerospace Engineering.
Published in Nature communication This week's results represent an important milestone in the field of swarm robotics, as previous research only demonstrated control of a single cyborg or had implemented control algorithms that required detailed and complex instructions for each insect that were not necessary to achieve coordinated movement from a cyborg can be carried out in large groups.
With the new method, the lead insect is informed of its intended destination and its control backpack coordinates with the others in the group to guide the swarm. This “tour leader” approach allows the swarm to adapt dynamically, as the insects can assist each other in overcoming obstacles and adjust their movements if a member becomes trapped.
The insects used are hissing cockroaches from Madagascar, equipped with a lightweight circuit board, sensors and a rechargeable battery on their backs, forming an autonomous navigation system that helps them navigate their environment and guide them to a destination move.
These cyborgs use significantly less energy than conventional robots, which rely on energy-intensive motors to move. The insects' natural instincts, combined with the swarm control algorithm, allow them to navigate complex terrain and respond quickly to environmental changes.
In experiments, the new algorithm reduced control interventions by about 50 percent compared to previous approaches and solved previous problems such as insects getting stuck or trapped in obstacles. This innovation will be useful for urban search and rescue operations and infrastructure inspections, where tight spaces and unpredictable conditions make traditional robots less effective.